Presentation¶
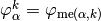
Let  be a triangular (2d) or tetrahedral (3d) mesh of
be a triangular (2d) or tetrahedral (3d) mesh of  corresponding
to the following data structure:
corresponding
to the following data structure:
![\mbox{\begin{tabular}{lccll}
\hline
\textbf{name} & \textbf{type} & \textbf{dimension} & \textbf{description}\\
\hline
$\nq$ & integer & 1 & number of vertices\\
$\nme$ & integer & 1 & number of elements\\
$\q$ & double & $d \times \nq$ &
\begin{minipage}[t]{7.9cm}
array of vertices coordinates. $\q(\nu,j)$ is the $\nu$-th coordinate of the $j$-th vertex,
$\nu\in\{1,\hdots,d\}$, $j\in\{1,\hdots,\rm{n_q}\}.$
The $j$-th vertex will be also denoted by $\rm{q}^j$
\end{minipage}\\
$\me$ & integer & $(d+1) \times \nme$ &
\begin{minipage}[t]{7.9cm}
connectivity array. $\me(\beta,k)$ is the storage index of the $\beta$-th vertex
of the $k$-th element, in the array~$q$, for $\beta\in\{1,\hdots,(d+1)\}$ and $k\in\{1,\hdots,{\nme}\}$
\end{minipage}\\
$\rm volumes$ & double & $1\times {\nme}$ &
\begin{minipage}[t]{7.9cm}
array of volumes in 3d or areas in 2d. ${\rm volumes}(k)$ is the $k$-th element volume (3d)
or element area (2d),
$k\in\{1,\hdots,{\nme}\}$
\end{minipage}\\
\hline
\end{tabular}}](_images/math/3b9d77cd2d39a25075a99c7e6376dce26018b9ed.png)
Scalar finite elements :
Let
 be the finite dimensional space spanned by
the
be the finite dimensional space spanned by
the  -Lagrange (scalar) basis functions
-Lagrange (scalar) basis functions  where
where  denotes the space of all polynomials defined over T of total
degree less than or equal to
denotes the space of all polynomials defined over T of total
degree less than or equal to  The functions
The functions  satisfy
satisfy
Then we have
 on
on  ,
,  such that
such that  .
.A
-Lagrange (scalar) finite element matrix is of the generic form
where
 is the bilinear differential operator (order
is the bilinear differential operator (order  )
defined for all
)
defined for all  by
by
and


 and
and  are given functions on
are given functions on 
We can notice that
 is a sparse matrix due to
support properties of functions.
is a sparse matrix due to
support properties of functions.Let
 The element matrix
The element matrix  , associated to , is the
, associated to , is the  matrix defined by
matrix defined by
where
 is the
is the  -th local basis function associated
to the
-th local basis function associated
to the  -th element.
-th element.For examples,
the Mass matrix is defined by
The corresponding bilinear differential operator
is completely defined with
 ,
,  and
and 
the Stiffness matrix is defined by
The corresponding bilinear differential operator
is completely defined with
 , and
, and 
Vector finite elements :
The dimension of the space
 is
is 
in dimension
 we have two natural basis :
we have two natural basis :the global alternate basis
 defined by
defined by
and the global block basis
 defined by
defined by
in dimension
 we have two natural basis :
we have two natural basis :the global alternate basis
defined by
and the global block basis
defined by
A
-Lagrange (vector) finite element matrix in basis
is of the generic form
where
 is the bilinear differential operator (order )
defined by
is the bilinear differential operator (order )
defined by
and
 is a bilinear differential operator of scalar type.
is a bilinear differential operator of scalar type.For example, in dimension
the Elastic Stiffness matrix is defined by
where
 is the strain tensor respectively and
is the strain tensor respectively and  is the Hooke matrix
is the Hooke matrix
Then the bilinear differential operator associated to this matrix is given by

We present now three algorithms (base, OptV1 and OptV2 versions) for assembling this kind of matrix.
Note
These algorithms can be successfully implemented in various interpreted languages under some assumptions. For all versions, it must have a sparse matrix implementation. For OptV1 and OptV2 versions, we also need a particular sparse matrix constructor (see Sparse matrix requirement). And, finally, OptV2 also required that the interpreted languages support classical vectorization operations. Here is the current list of interpreted languages for which we have successfully implemented these three algorithms :
- Python with Numpy and Scipy modules,
- Matlab,
- Octave,
- Scilab
Classical assembly algorithm (base version)¶
Due to support properties of  -Lagrange basis functions, we have the classical algorithm :
-Lagrange basis functions, we have the classical algorithm :
Note
We recall the classical matrix assembly in dimension  with
with
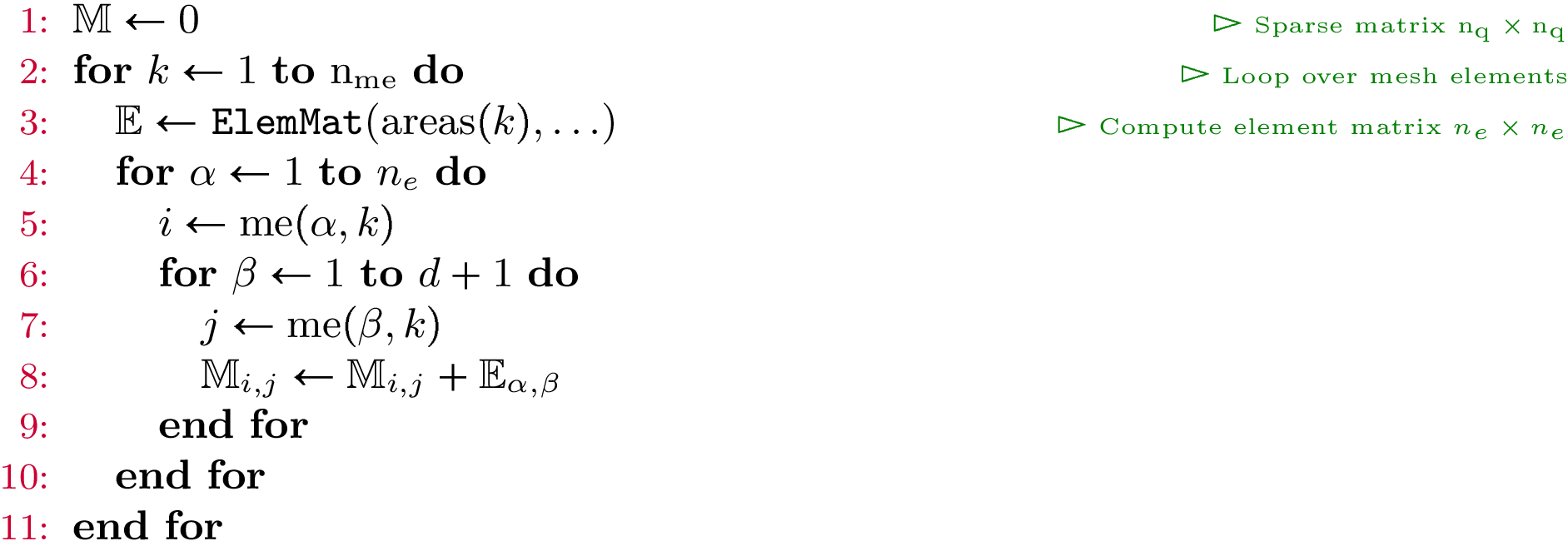
Figure 43: Classical matrix assembly in 2d or 3d
In fact, for each element we add its element matrix to the global sparse matrix (lines 4 to 10 of the previous algorithm). This operation is illustrated in the following figure in 2d scalar fields case :
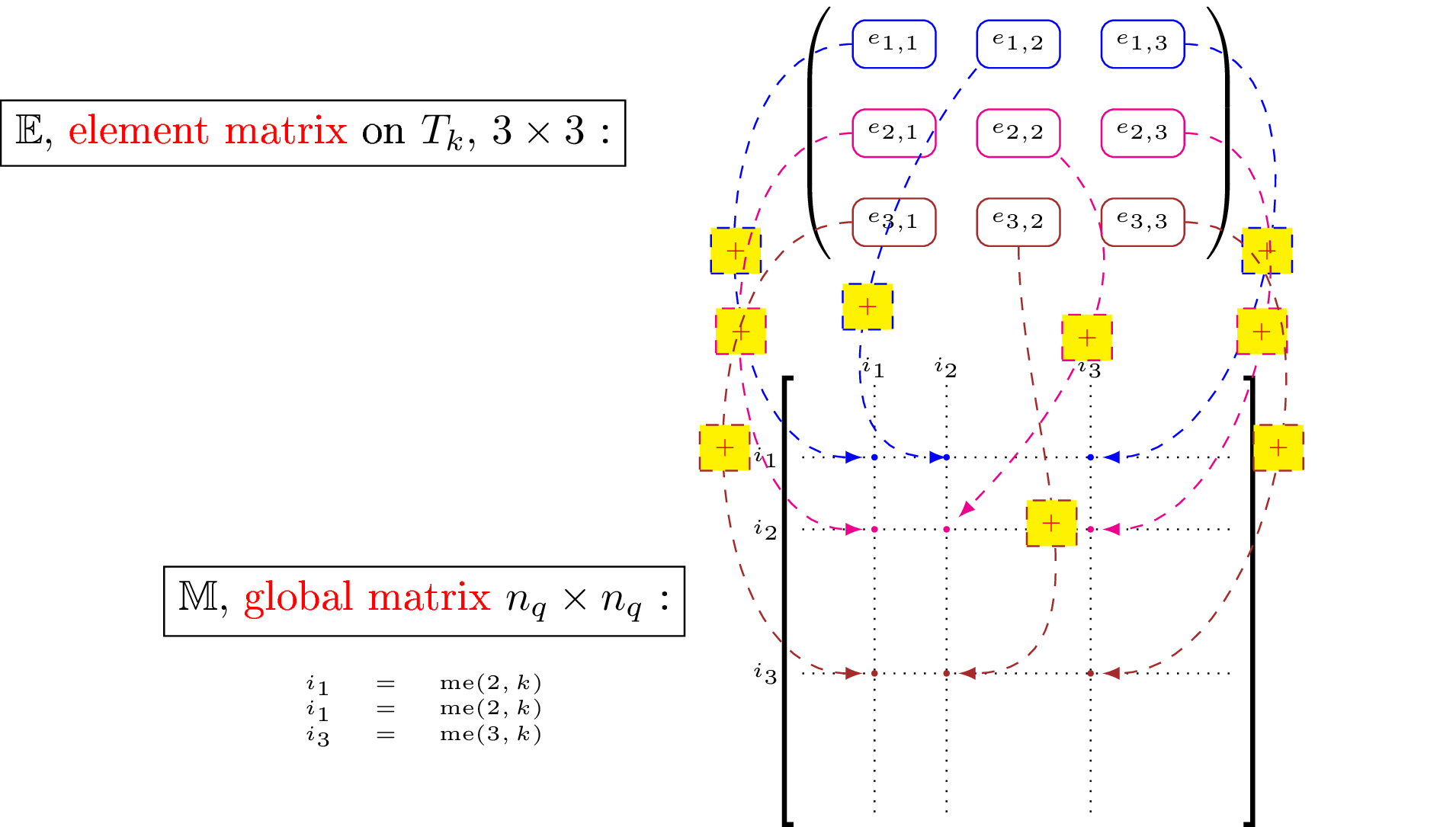
Figure 44: Adding of an element matrix to global matrix in 2d scalar fields case
The repetition of elements insertion in sparse matrix is very expensive.
Sparse matrix requirement¶
The interpreted language must contain a function to generate a sparse matrix M from three 1d arrays of same length Ig, Jg and Kg such that M(Ig(k),Jg(k))=Kg(k) . Furthermore, the elements of Kg having the same indices in Ig and Jg must be summed.
- We give for several interpreted languages the corresponding function :
- Python (scipy.sparse module) : M=sparse.<format>_matrix(Kg,(Ig,Jg),shape=(m,n) where <format> is the sparse matrix format chosen in csc , csr , lil ,...
- Matlab : M=sparse(Ig,Jg,Kg,m,n), only csc format.
- Octave : M=sparse(Ig,Jg,Kg,m,n), only csc format.
- Scilab : M=sparse([Ig,Jg],Kg,[m,n]), only row-by-row format.
Obviously, this kind of function exists in compiled languages. For example, in C language, one can use the SuiteSparse from T. Davis and with Nvidia GPU, one can use Thrust library.
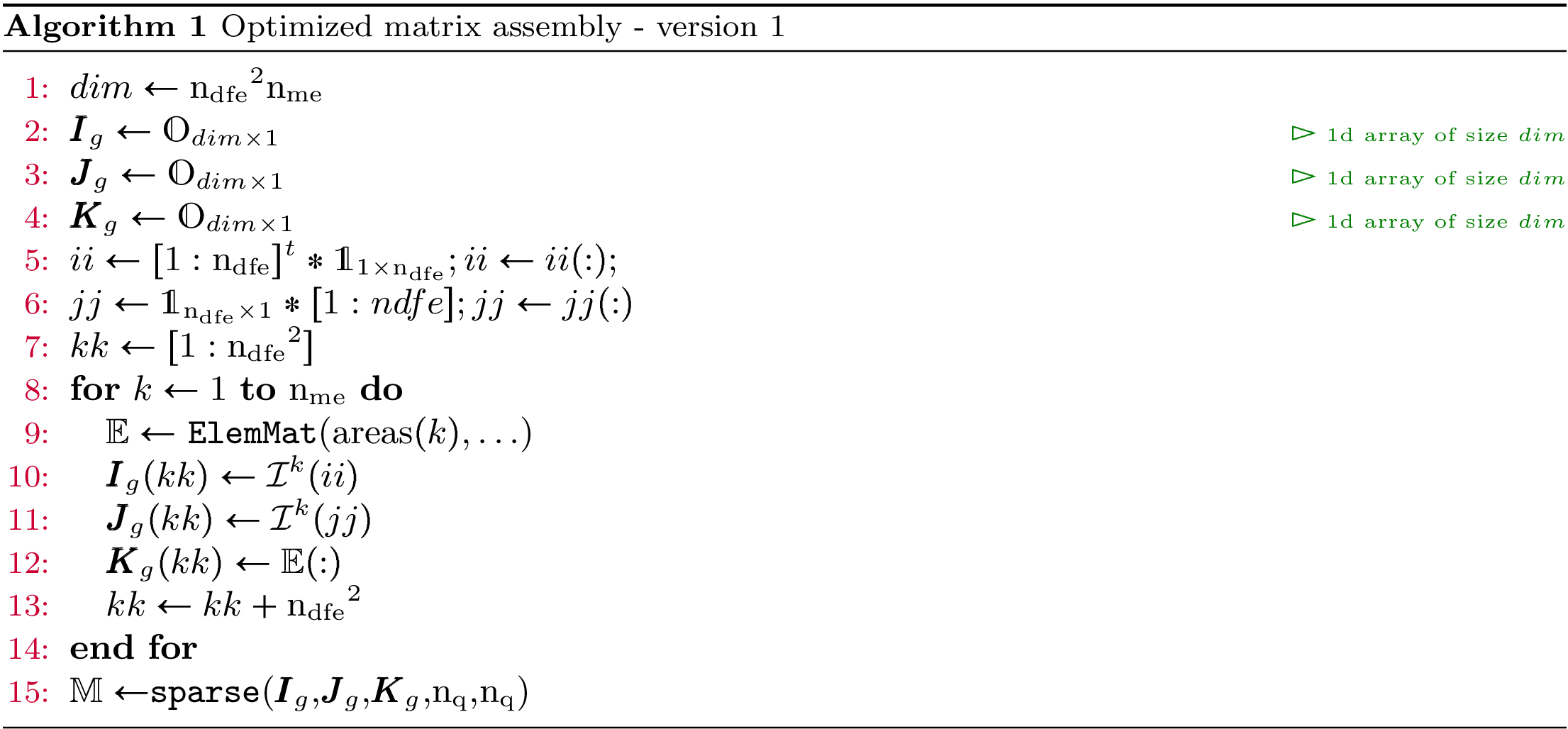
Optimized classical assembly algorithm (OptV1 version)¶
The idea is to create three global 1d-arrays 
 and
and  allowing the storage of the element matrices as well as the position of their elements in the global matrix.
The length of each array is
allowing the storage of the element matrices as well as the position of their elements in the global matrix.
The length of each array is  (i.e.
(i.e.  for
for  and
and  for
for  ).
Once these arrays are created, the matrix assembly is obtained with one of the previous commands.
).
Once these arrays are created, the matrix assembly is obtained with one of the previous commands.
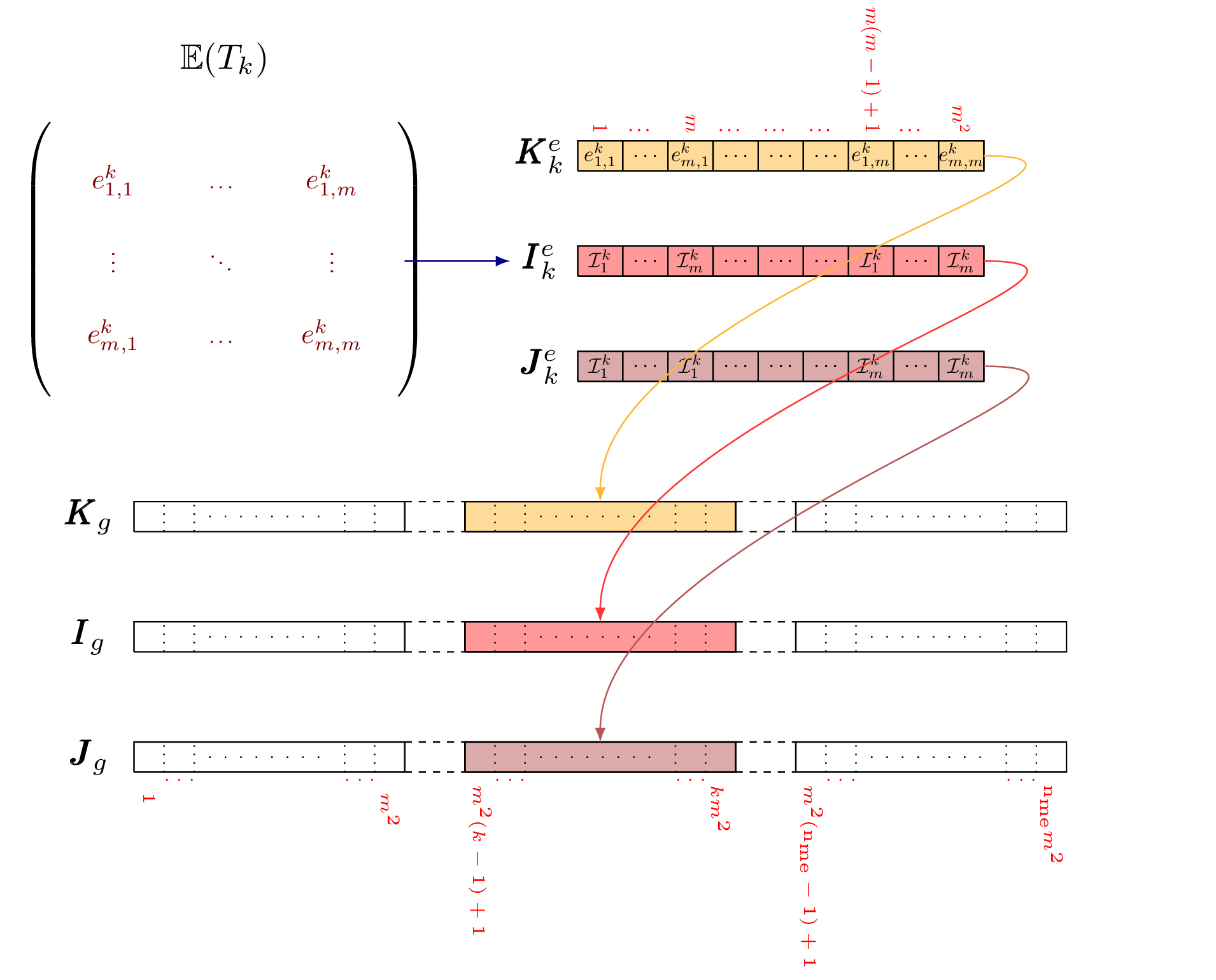
To create these three arrays, we first define three local 1d-arrays 
 and
and  of
of  elements obtained from a generic element matrix
elements obtained from a generic element matrix  of
dimension
of
dimension  :
:

From these arrays, it is then possible to build the three global arrays
and  of size
of size
 defined,
defined,

 by
by

So, for each triangle , we have
Then, a simple algorithm can build these three arrays using a loop over each triangle.
Note
We give the complete OptV1 algorithm
New Optimized assembly algorithm (OptV2 version)¶
We present the optimized version 2 algorithm where no loop is used.
We define three 2d-arrays that allow to store all the element matrices
as well as their positions in the global matrix. We denote by 
 and
and  these
these  arrays, defined
arrays, defined 
 by
by
(1)
The three local arrays and are thus stored
in the  column of the global arrays and respectively.
column of the global arrays and respectively.
A natural way to build these three arrays consists in using a loop through the triangles
in which we insert the local arrays column-wise
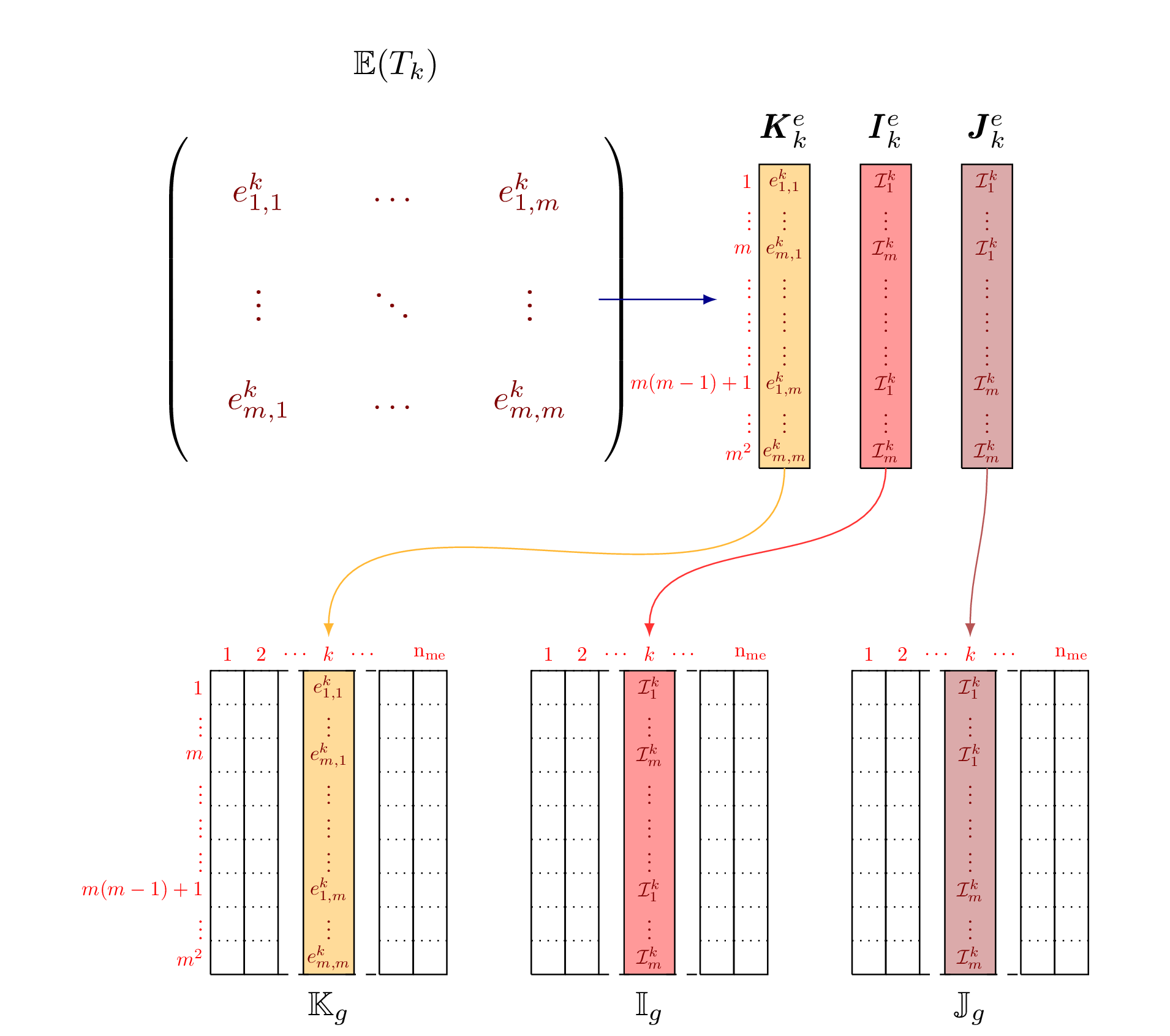
Figure 48: Construction of  ,
,  and
and  with loop
with loop
The natural construction of these three arrays is done column-wise. So, for each array there are
 columns to compute, which depends on the mesh size.
To vectorize, we must fill these arrays by row-wise operations and then for each array there are
rows to compute. We recall that does not depend on the mesh size.
These rows insertions are represented in Figure 49 . We can also remark that,
columns to compute, which depends on the mesh size.
To vectorize, we must fill these arrays by row-wise operations and then for each array there are
rows to compute. We recall that does not depend on the mesh size.
These rows insertions are represented in Figure 49 . We can also remark that,
 , with
, with 

where, in scalar fields case, 
 and in vector fields case,
and in vector fields case, 


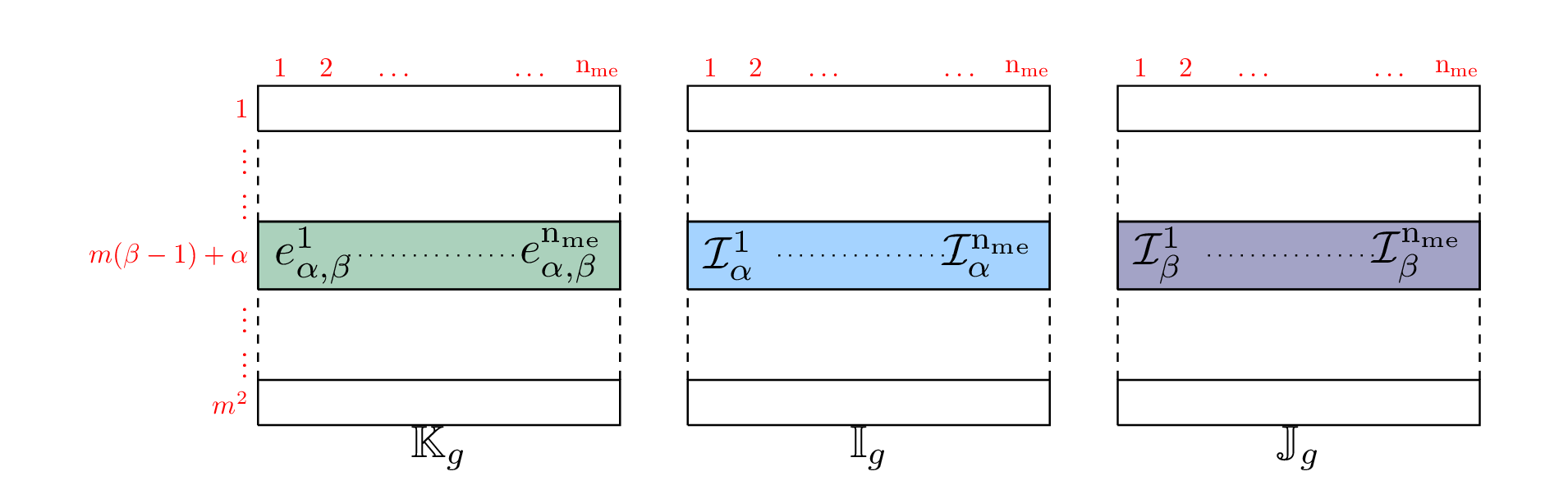
Figure 49: Row-wise operations on global arrays  and
and
As we can see in Figures 50 and 51,
it is quite easy to vectorize and computations in scalar fields case
by filling these arrays lines by lines :
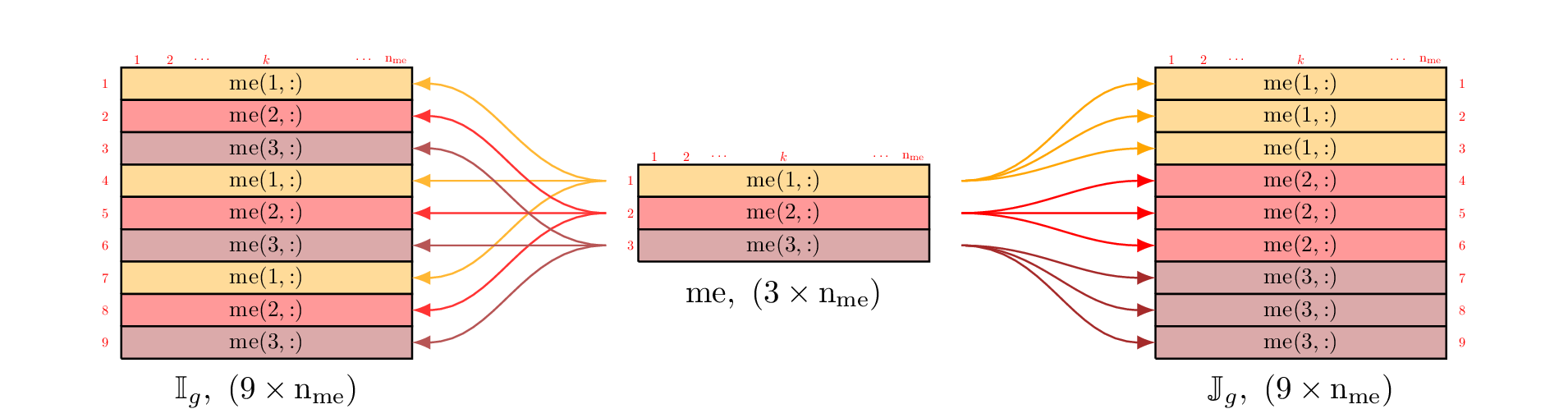
Figure 50: Construction of and : OptV2 version for 2d scalar matrix
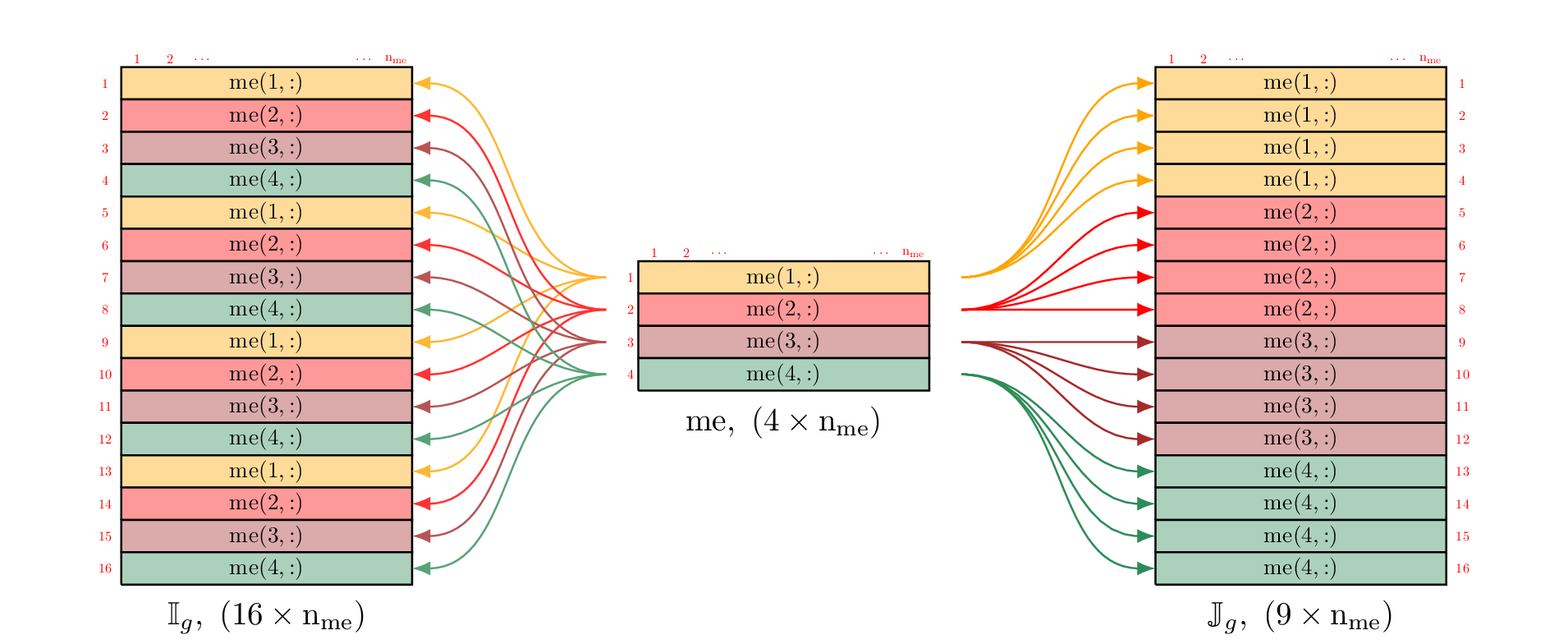
Figure 51: Construction of and : OptV2 version for 3d scalar matrix
Using vectorization tools, we can compute and in one line. The vectorized algorithms in 2d and 3d scalar fields are represented by Figure 52.
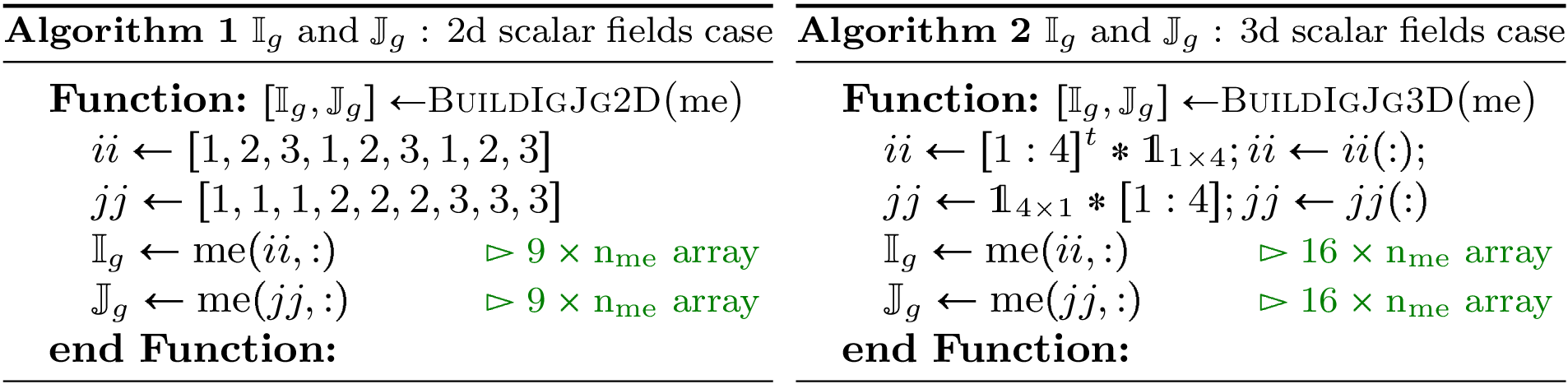
Figure 52: Vectorized algorithms for and computations
In vector fields case, we construct the tabular  such that
such that

 Then we can vectorize and computations in vector fields case.
We represent in Figure 53 these operations in 2d.
Then we can vectorize and computations in vector fields case.
We represent in Figure 53 these operations in 2d.
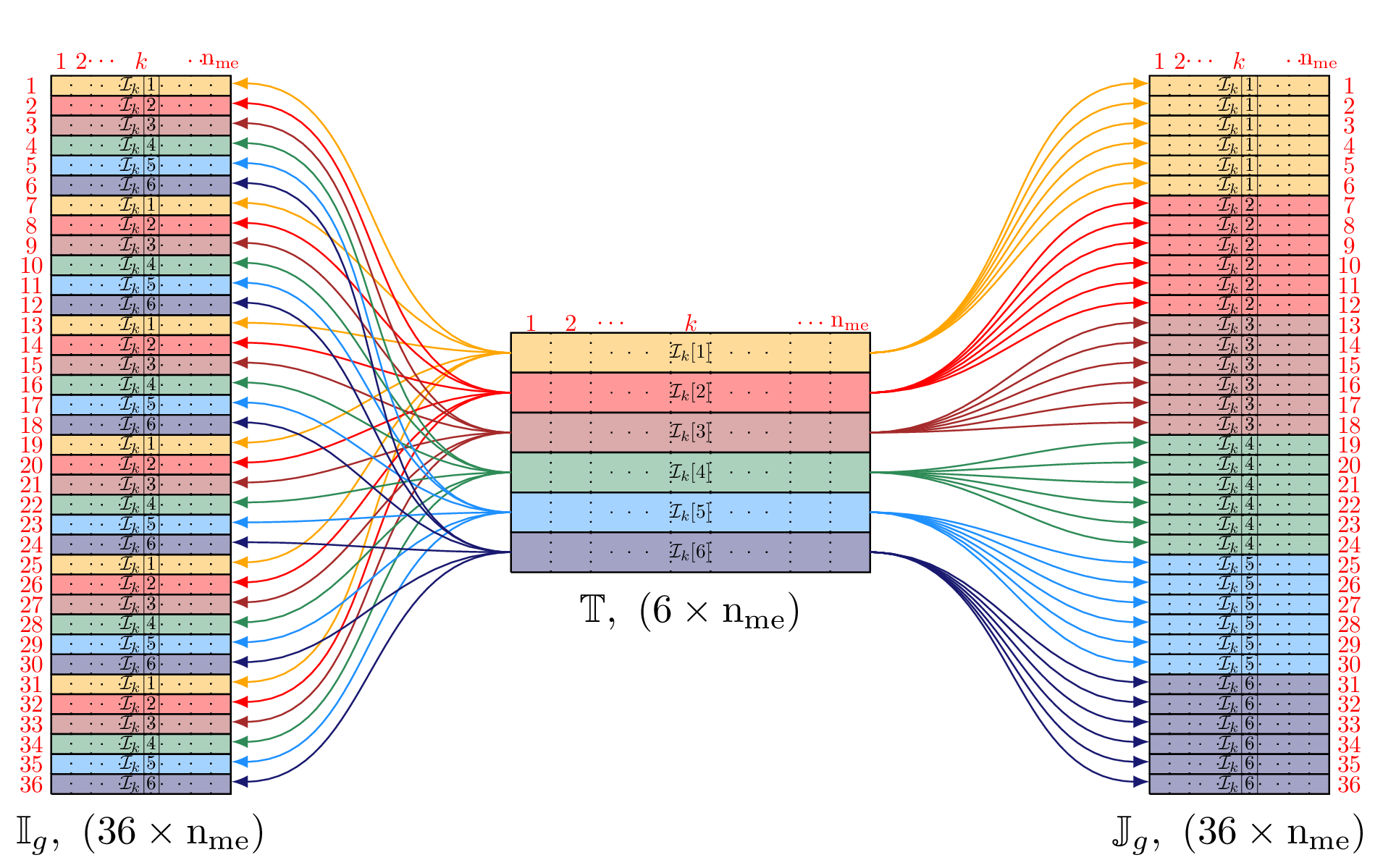
Figure 53: Construction of and : OptV2 version in 2d vector fields case
Now, it remains to vectorize the computation of array
which contains all the element matrices associated to or  :
it should be done by row-wise vector operations.
:
it should be done by row-wise vector operations.
We now describe a vectorized construction of array associated to a generic
bilinear form  . For the mesh element , the element matrix is then given by
. For the mesh element , the element matrix is then given by

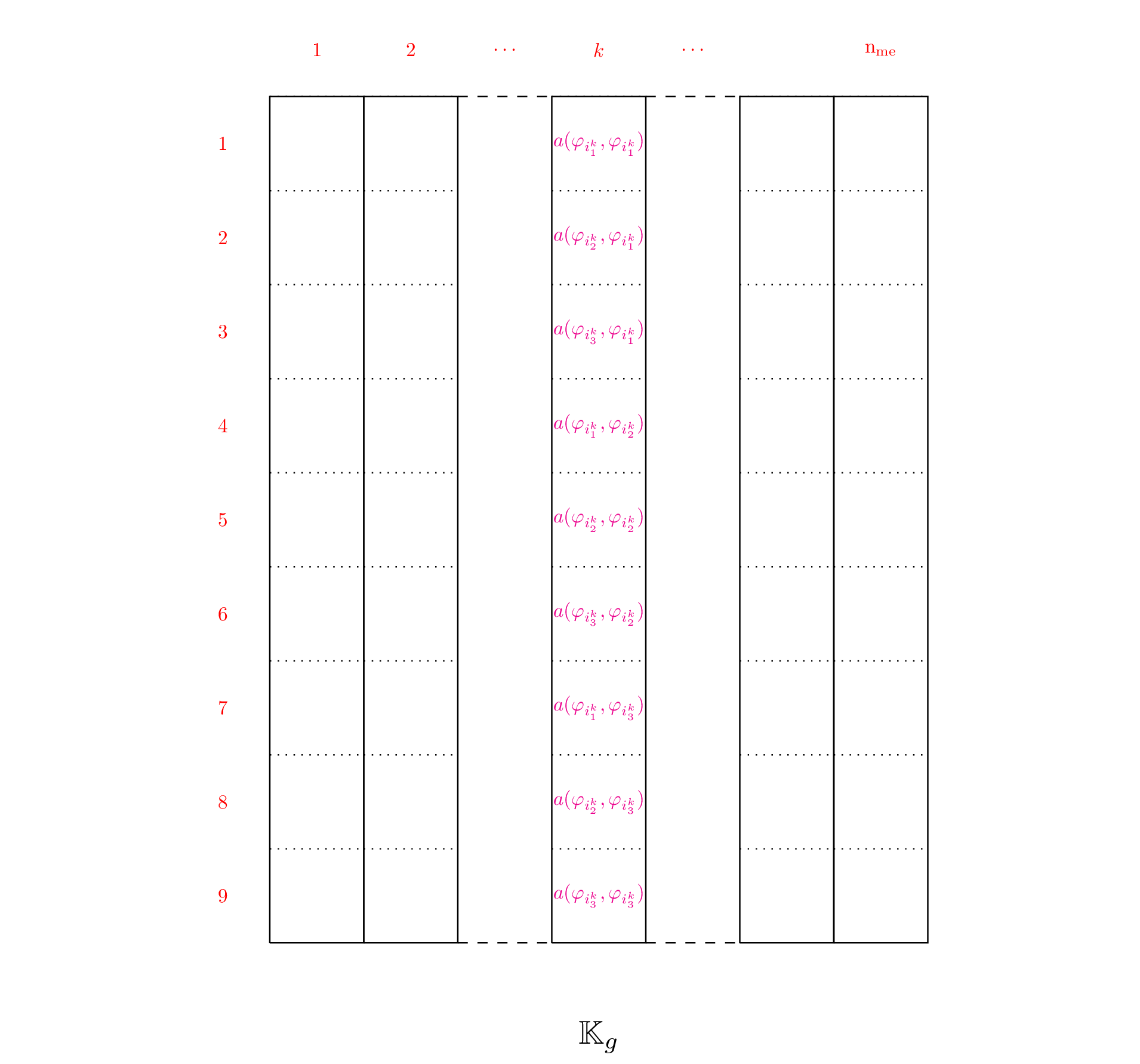
Figure 54: Construction of for Mass matrix
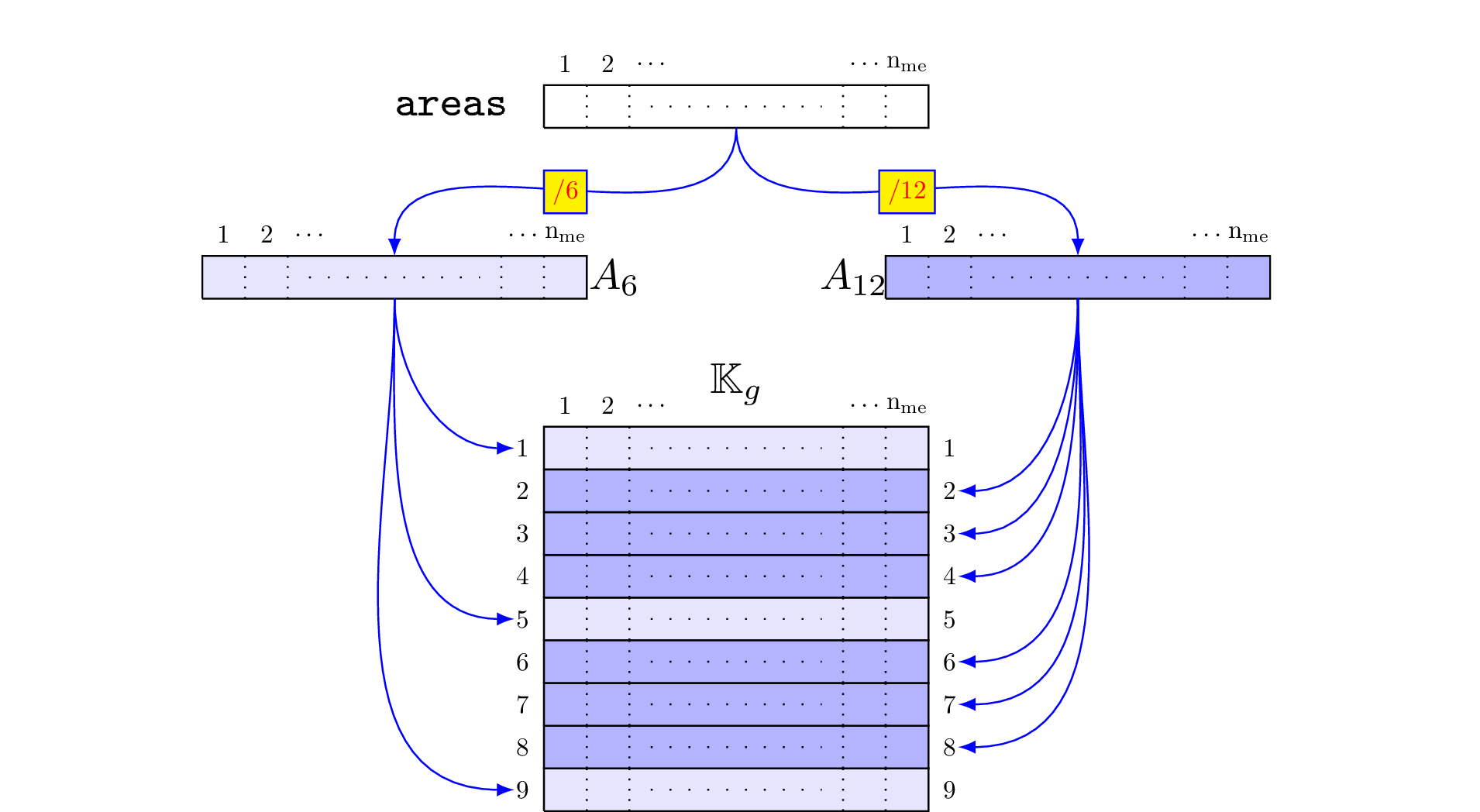
Figure 55: Construction of for Mass matrix
